Projects
2025

Multi-Robot System: Safe Warehouse Convoy with CLF-CBF Control
A mathematically guaranteed collision-free leader-follower convoy system for mobile robots in Isaac Sim, implementing Control Lyapunov Functions (CLF) and Control Barrier Functions (CBF) for safety-critical control. Continue reading Multi-Robot System: Safe Warehouse Convoy with CLF-CBF Control

Bio-Inspired Quadruped Spiderbot
A low-cost 12-DOF quadruped robot with forward kinematics gait control, integrated SLAM, and YOLOv8 object detection. Parallel simulation studies exploring CPG-RL approaches using Van der Pol oscillators. Continue reading Bio-Inspired Quadruped Spiderbot
Sustainable AI: Efficient Knowledge Access with Agentic RAG
Secure multi-SLM RAG system with intelligent routing and role-based access control. Reduces AI costs by 90% and energy use by 87% through domain-aware model selection. Continue reading Sustainable AI: Efficient Knowledge Access with Agentic RAG

Autonomous Take-off, Line-Following, and Landing with Parrot Mambo
Simulink + Stateflow vision control to take off, track a TI RSLK Max line-follower, and land on a blue moving platform using color segmentation and blob analysis. Continue reading Autonomous Take-off, Line-Following, and Landing with Parrot Mambo
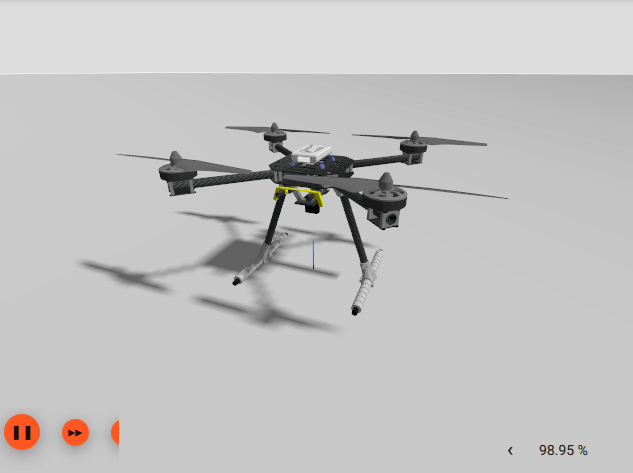
Autonomous UAV for Object Correspondence in Digital Twin Terrains
Continue reading Autonomous UAV for Object Correspondence in Digital Twin Terrains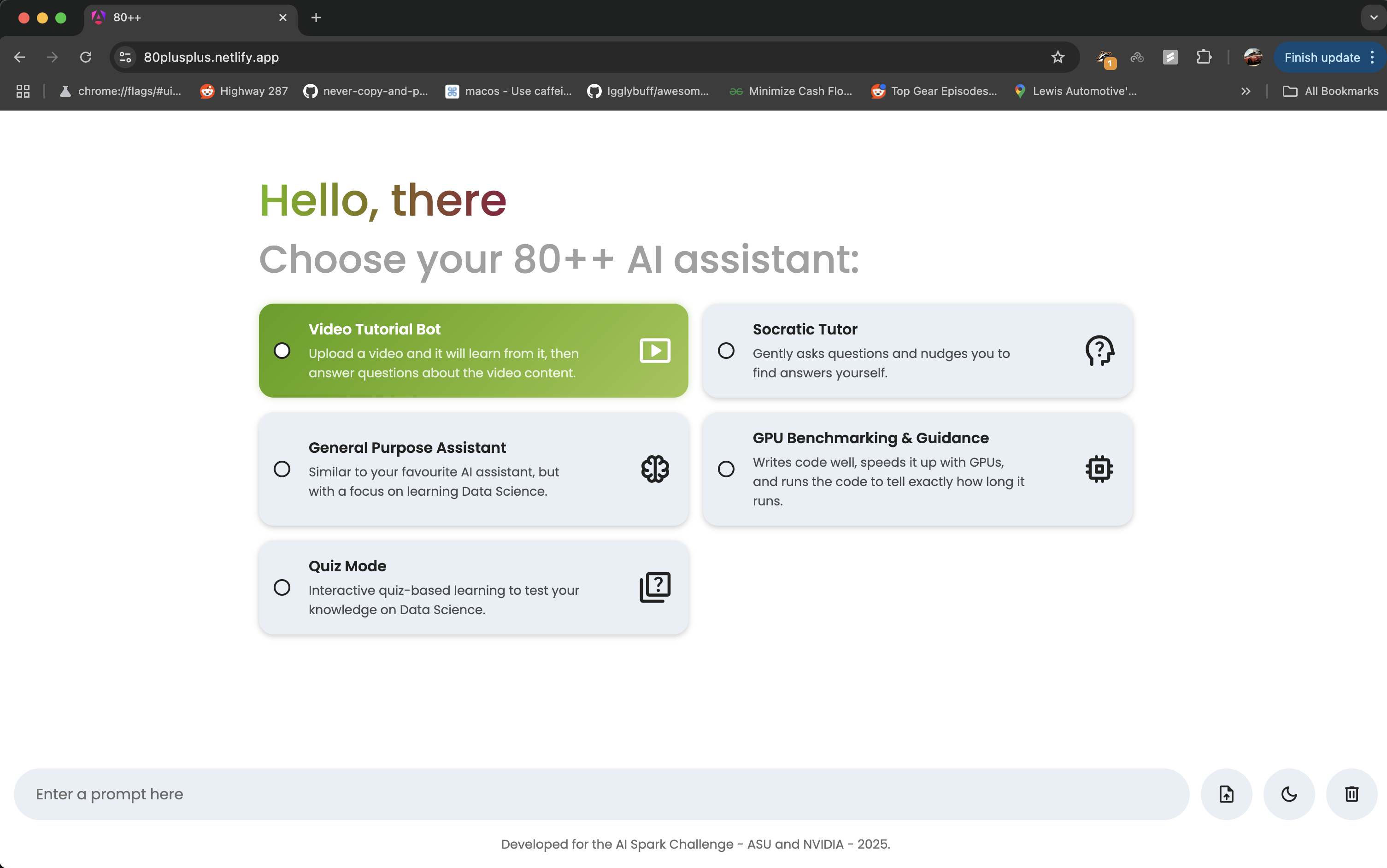
AI‑Accelerated Multi‑Modal Tutor
LLM+RAG tutor with PDFs/videos, CPU→GPU conversion, and benchmarks on NVIDIA A100. Continue reading AI‑Accelerated Multi‑Modal Tutor
2024
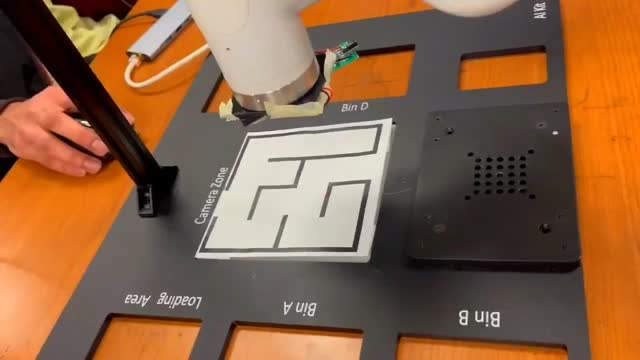
Solving a 4×4 Maze with MyCobot Pro 600
Digital twin–backed maze solving using MATLAB’s watershed transform, pixel→world conversion, IK path planning, and TCP control of a MyCobot Pro 600. Continue reading Solving a 4×4 Maze with MyCobot Pro 600
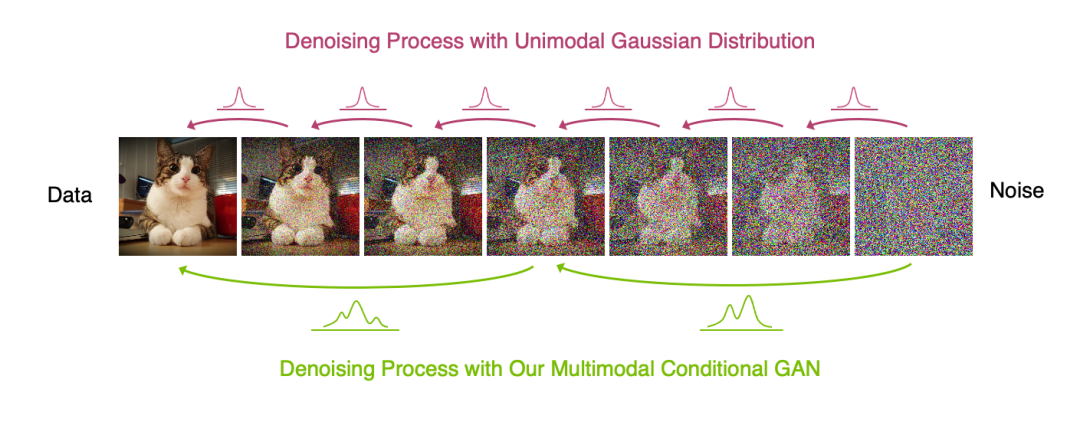
Project Overview
Ultra-Fast Image Generation and Controllable Facial Attribute Editing Continue reading Project Overview